Echosounders and Fishfinders
Echo sounding is a type of sonar used to determine the depth of water by transmitting sound waves into water. The time interval between emission and return of a pulse is recorded, and is used to determine the depth of water and detecting fish amongst other things.
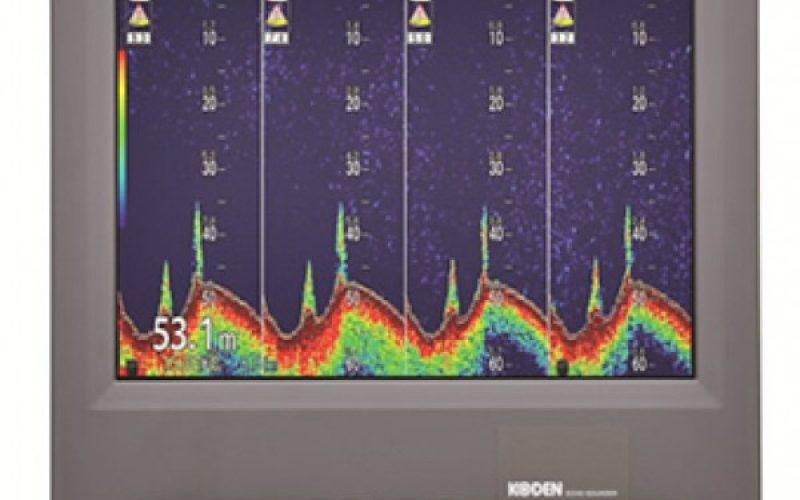
A fishfinder is used to locate fish underwater, typically using a 200 kHz transducer, which is suitable for inshore work up to 120 metres in depth. Deeper water requires a lower frequency transducer. A modern fishfinder displays measurements of reflected sound on a graphical display, allowing an operator to interpret information to locate schools of fish, underwater debris, and the bottom of a body of water. Fishfinders are used both by sport and commercial fishermen. Modern electronics allows a high degree of integration between the fishfinder system, marine radar, compass and GPS navigation systems.
High resolution images can be obtained in shallow waters for visualisation of the bottom using frequencies in the ranges 800 and 455 khz. A 200 kHz transducer, which is suitable for inshore work up to 100 metres in depth.
In areas where detailed bathymetry is required, a precise echo sounder may be used for the work of hydrography. There are many considerations when evaluating such a system, salinity, water temperature, vertical accuracy, resolution, acoustic beam width of the transmit/receive beam and the acoustic frequency of the transducer.
Deeper water requires a lower frequency transducer as the acoustic signal of lower frequencies is less susceptible to attenuation in the water column. Commonly used frequencies for deep water sounding are 50, 33 and 24 kHz.